Experimento 1
Introdução
O primeiro experimento realizado será em um sistema térmico do tipo aquecedor, com uma resistência de potência fixa ligada à rede elétrica. O controle é realizado por um módulo gradador, que corta a onda senoidal e aplica apenas parte dela na carga. Esse experimento tem o objetivo de ajudar o aluno a modelar e simular um sistema térmico, projetar o controlador e finalmente realizar o controle no sistema físico.
Modelagem
Modelagem da Subida
Os sistemas térmicos possuem modelagem simplificada graças à natureza do processo: são geralmente processos lentos, lineares e sem muitas perturbações. Outro ponto importante nesse sistema térmico é que os coeficientes são fáceis de se obter, como calor específico da água e potência do atuador. O primeiro passo é obter a equação básica do processo:
onde:
A equação pode ser reescrita facilmente sabendo que \(Q = P \cdot t\), onde P é a potência do atuador e t o tempo. Também podemos fazer \(\Delta T = T_2 - T_1\) para simplificar os termos:
Rearranjando os termos:
O que equivale a dizer:
Aplicando a transformada de Laplace e resolvendo o sistema:
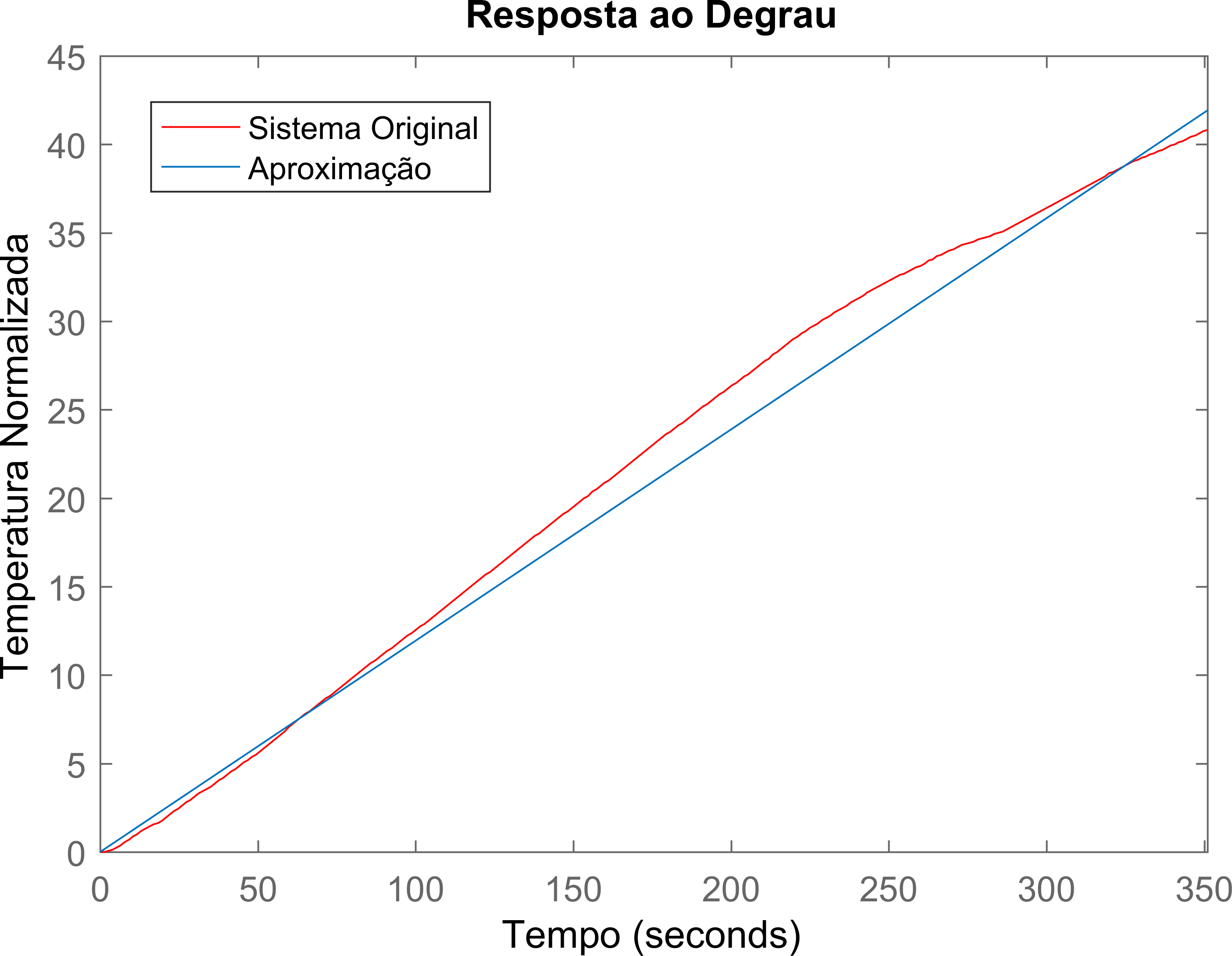
Uma das principais preocupações de um aluno de Controle e Automação é que a modelagem não bate com os valores reais, e com razão: a modelagem nunca leva em conta todos os parâmetros do processo. Mas nesse caso, a modelagem está bem próxima dos valores obtidos empiricamente:
E como podemos ver, essa modelagem está muito próxima da resposta real do sistema:
Modelagem da Descida
Não é incomum termos que modelar, além do impacto do degrau no sistema, o impacto do degrau negativo. No entanto, como o sistema é térmico, não é possível aplicar um sinal de controle negativo apenas com a resistência: seria necessário um outro atuador para melhorar a troca térmica do sistema.
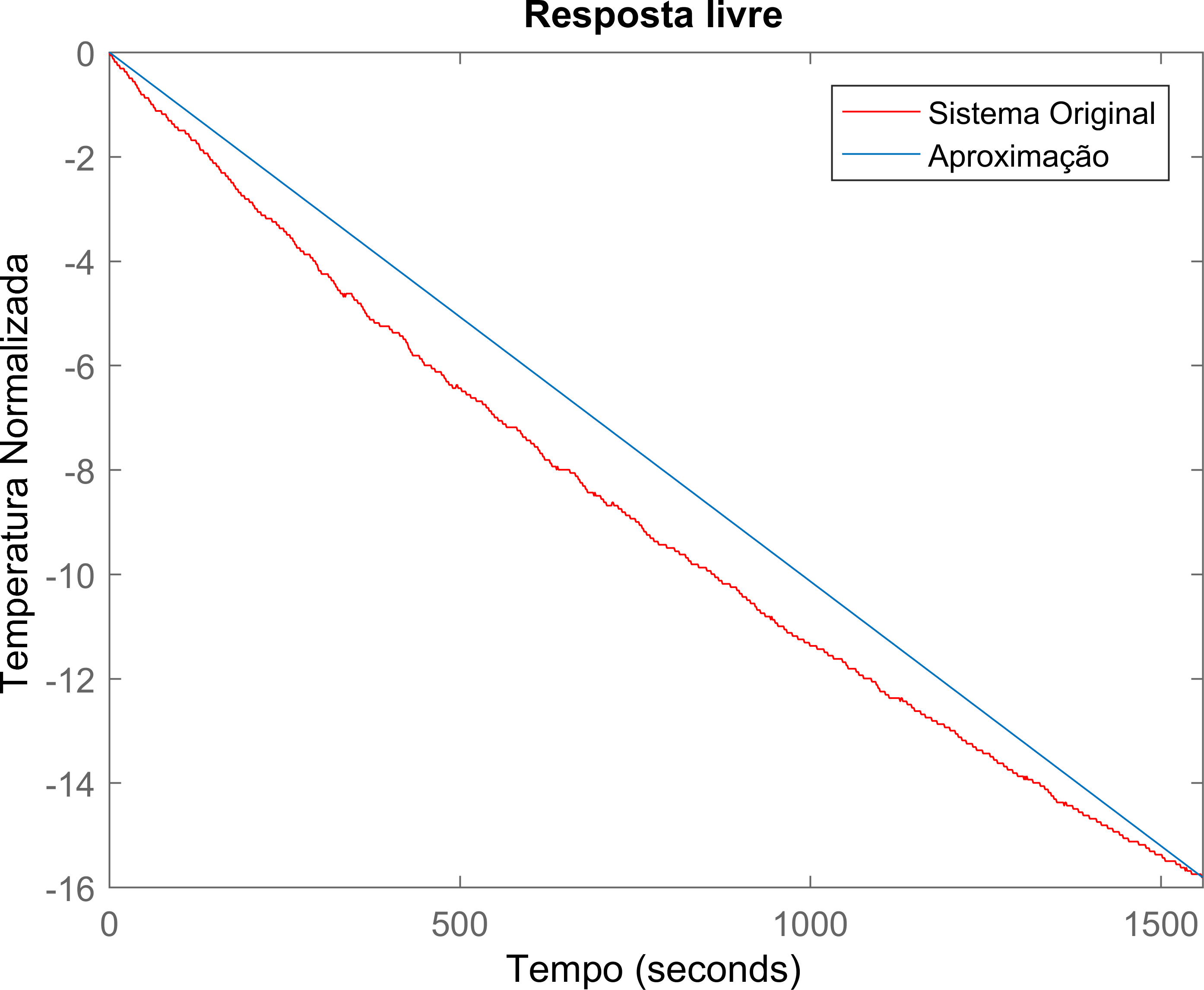
No entanto, podemos considerar o sistema sem atuação e ver como que a temperatura decai com o passar do tempo. Obtemos um modelo empírico desse cenário, já que é difícil modelar as trocas de calor para um objeto tão irregular como uma panela. Por simplicidade, a aproximação também foi feita usando um sistema integrador.
O que equivale a uma função de transferência:
Pode-se observar que o sistema em questão apresenta uma resposta de descida muito mais lenta que a resposta de subida. Isso implica que o controlador projetado não deve possuir overshoot, já que o tempo de resposta da descida é aproximadamente 10 vezes maior que a subida.
Modelagem do Sensor de Temperatura
A modelagem do sensor de temperatura foi simplificada para possuir uma dinâmica de primeira ordem. Como o sensor apresentou uma resposta com t5% = 15 s em alguns testes realizados, a dinâmica foi estimada como a função de transferência a seguir:
Modelagem do Atuador
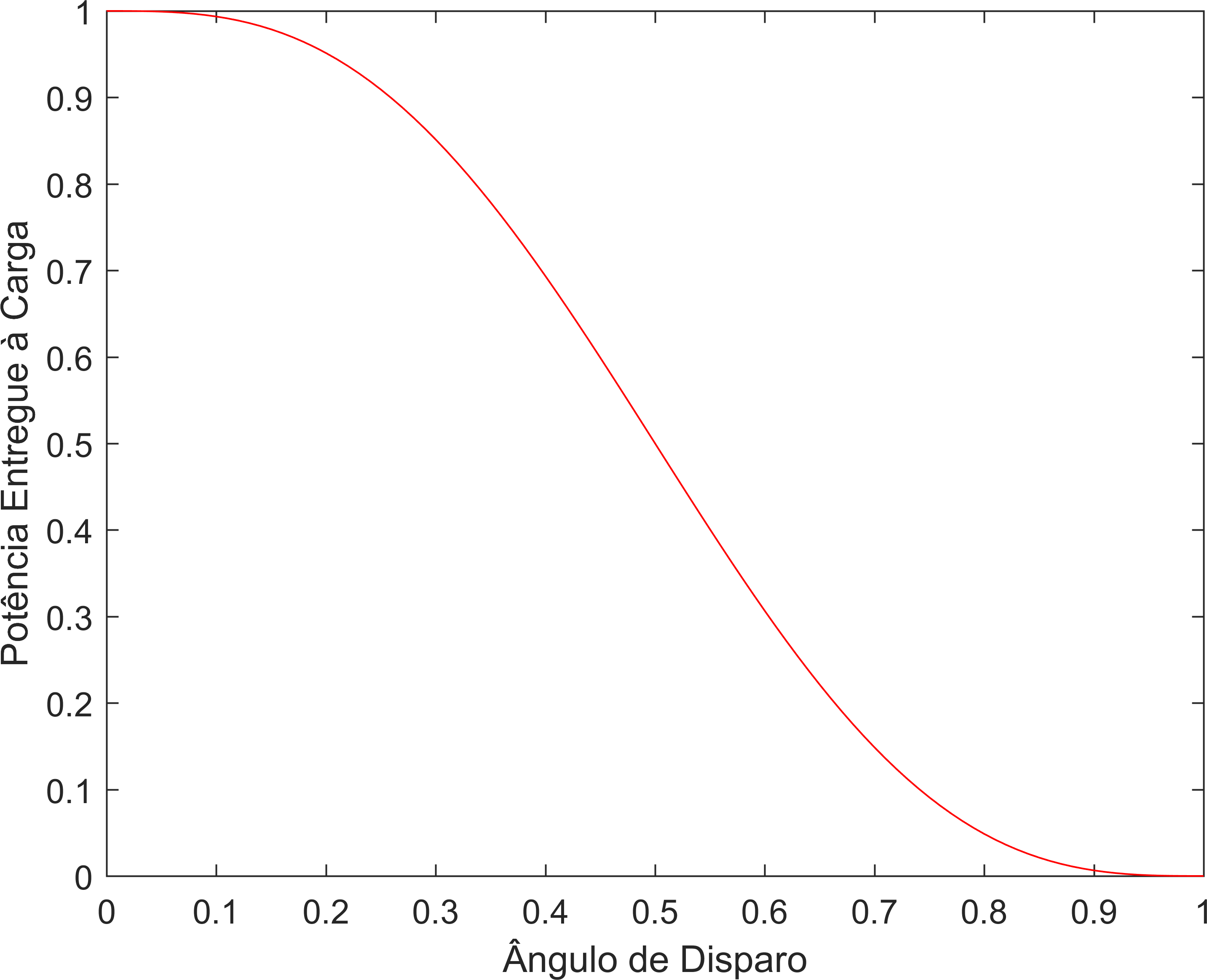
O atuador altera o ângulo de disparo de acordo com a tensão de entrada, mas como a onda é senoidal, a potência entregue na carga não é linear. Isso faz com que tenhamos que modelar o atuador também para melhor aplicar a ação de controle.
A equação que define a tensão de saída de acordo com um ângulo de disparo \( \alpha \) é:
E a potência entregue à carga é:
Como estamos assumindo que o valor da entrada U’(t) varia de 0 a 1, podemos então achar a função que define o atuador:
Por fim, o gráfico mostra a resposta em potência dado um ângulo de disparo.
Modelo Completo
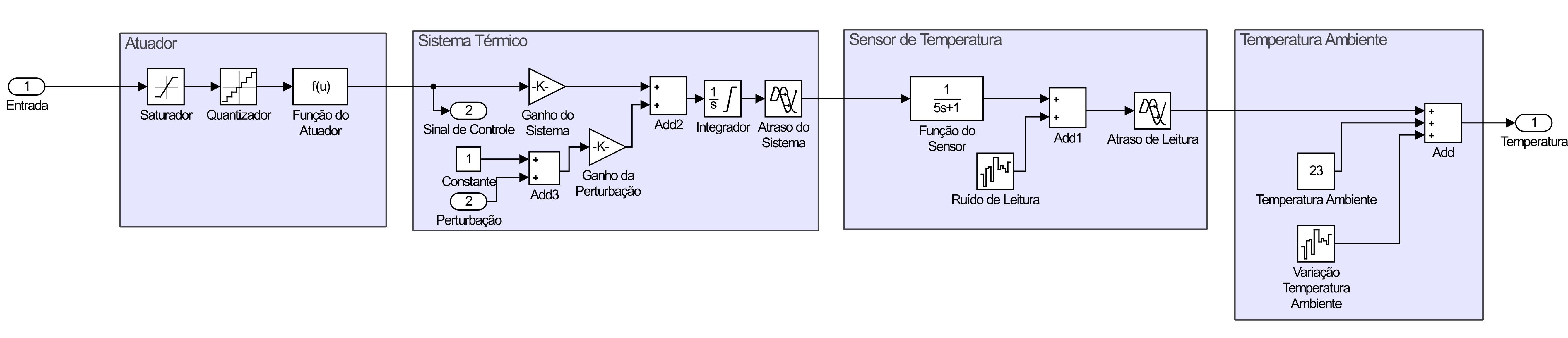
Com base nos modelos obtidos anteriormente, pode-se obter um modelo completo da planta. Foi feito um bloco com o modelo no simulink para testar os possíveis controladores no sistema.
Baixe o modelo no Simulink para utilizar no MATLAB.
Baixar modeloProjetando o Controlador
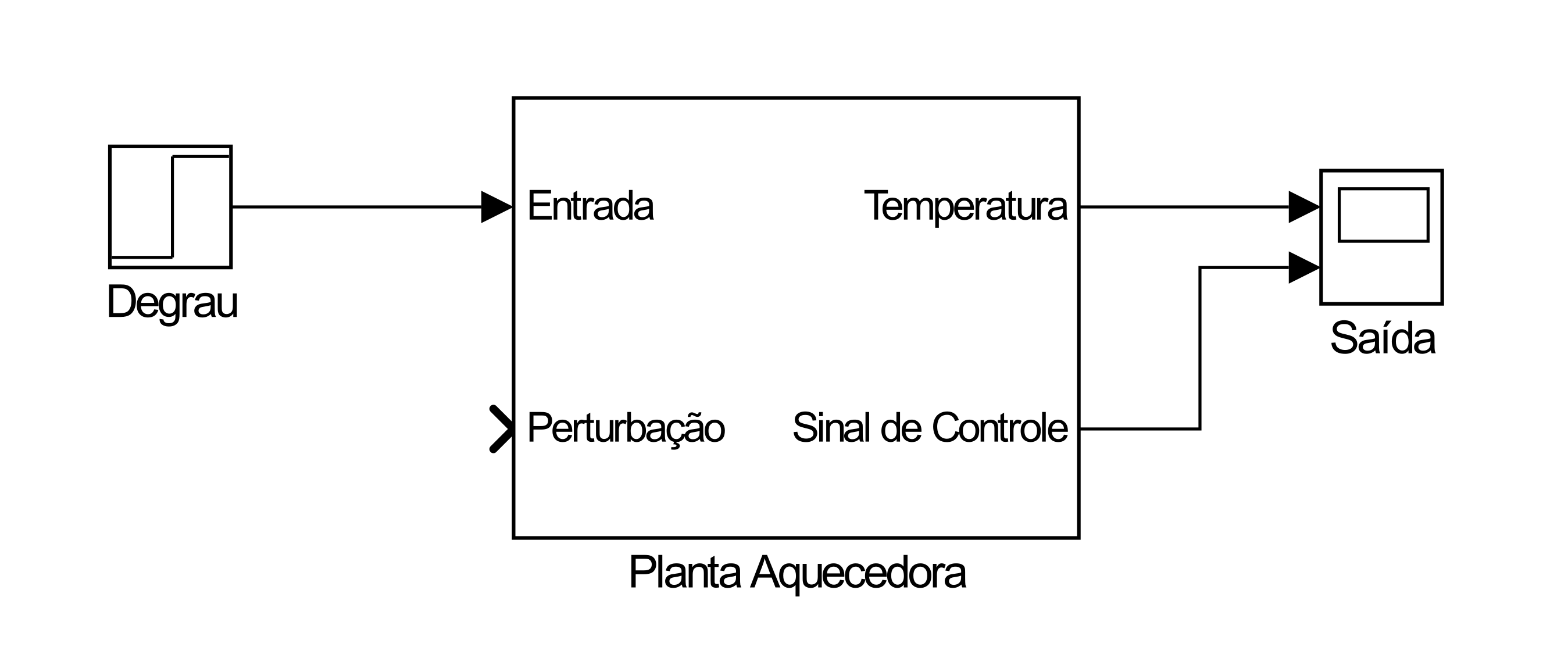
Uma das vantagens de um sistema térmico é que seu controle é simplificado devido tanto à dinâmica mais lenta quanto à menor complexidade. O sistema modelado é um integrador (1/s), que não só garante erro nulo em malha fechada para o degrau como pode ser facilmente controlado com a técnica On/Off, onde o atuador é apenas ligado e desligado. Abaixo está o diagrama de blocos para medir a resposta ao degrau do sistema.
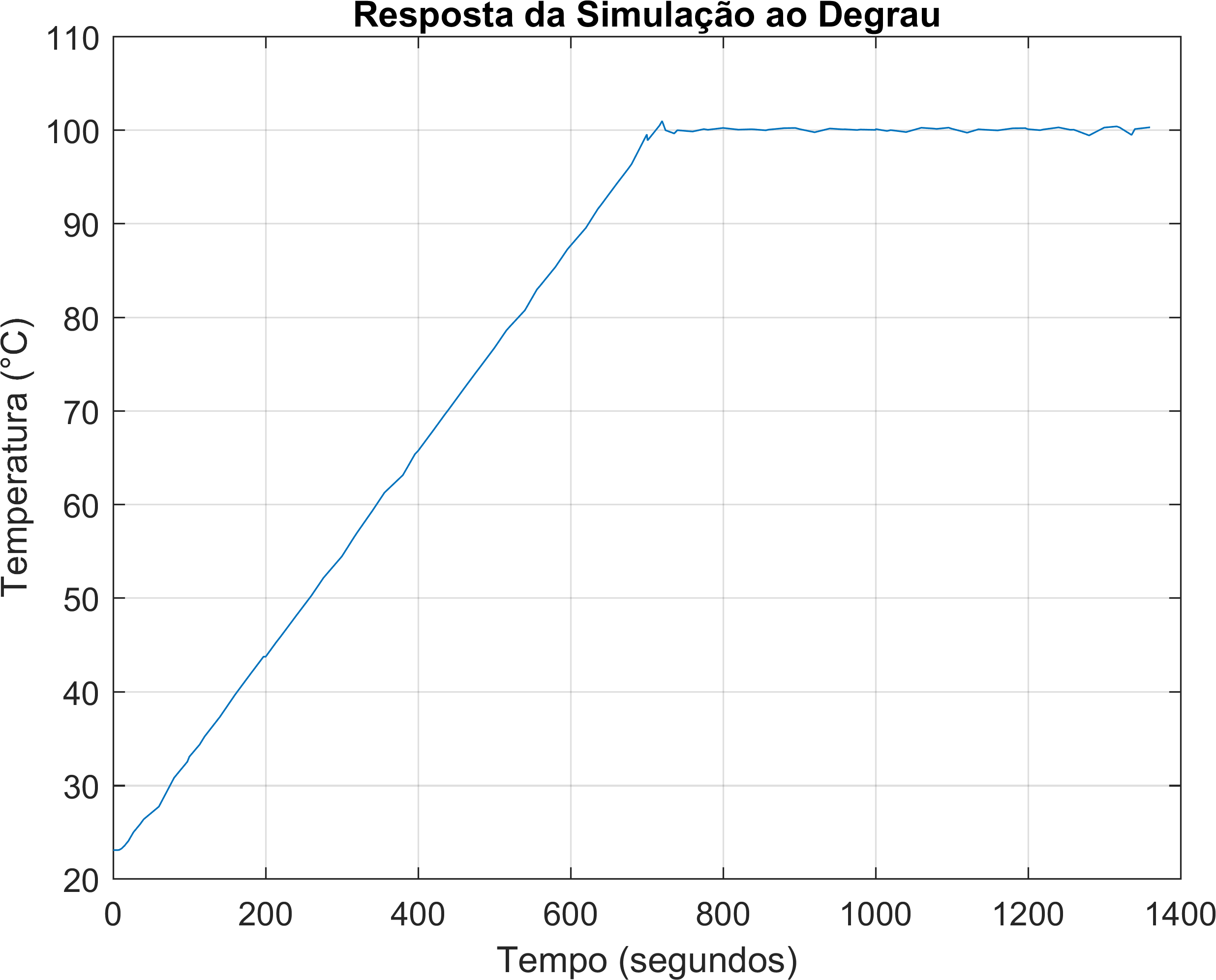
Utilizando o modelo de Matlab, vamos observar a resposta do sistema em malha aberta ao degrau.
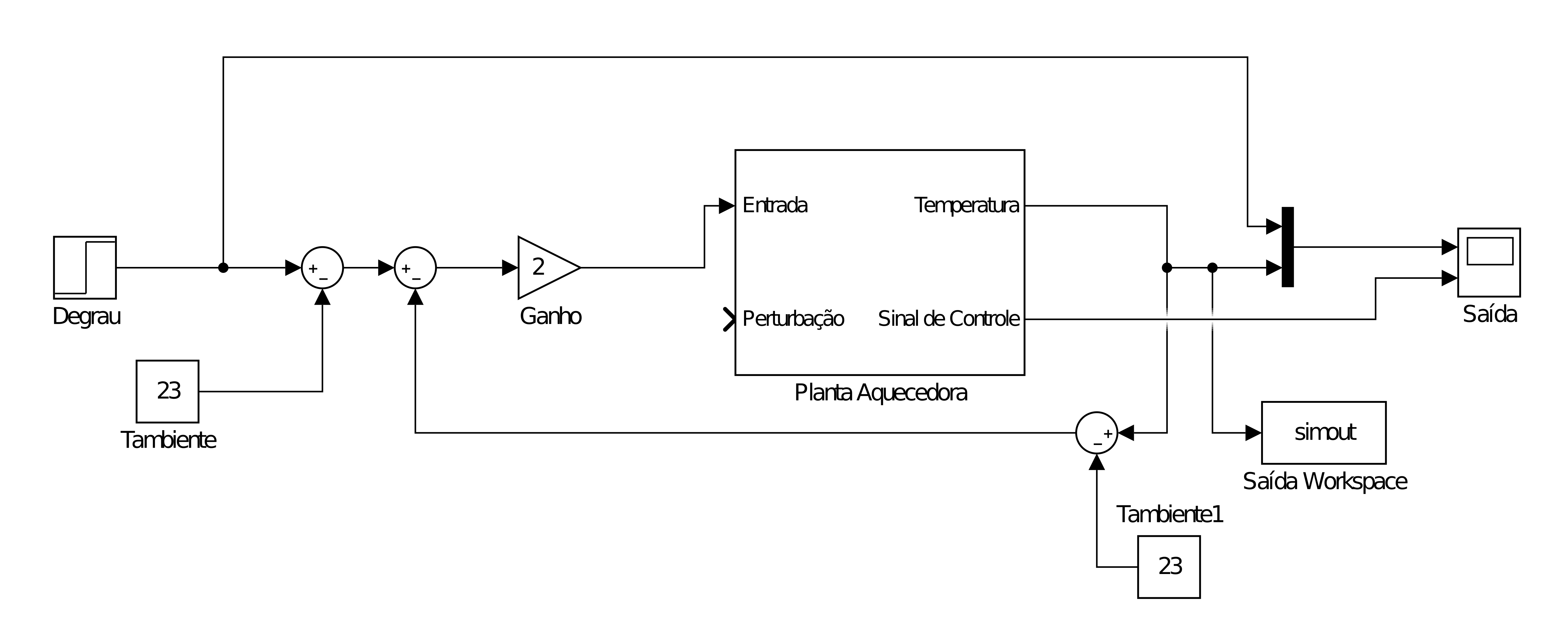
O controle pode ser feito como mostra a figura a seguir. Note que é necessário zerar os offsets de temperatura na realimentação porque o sistema deve ser linearizado (ou seja, quando a entrada é zero, a saída é zero, que equivale à temperatura ambiente). Escolheu-se 23 ºC porque é a temperatura média em Blumenau/SC, mas você pode alterar ou mesmo usar o primeiro valor de medição de temperatura como base.
Controle On/Off
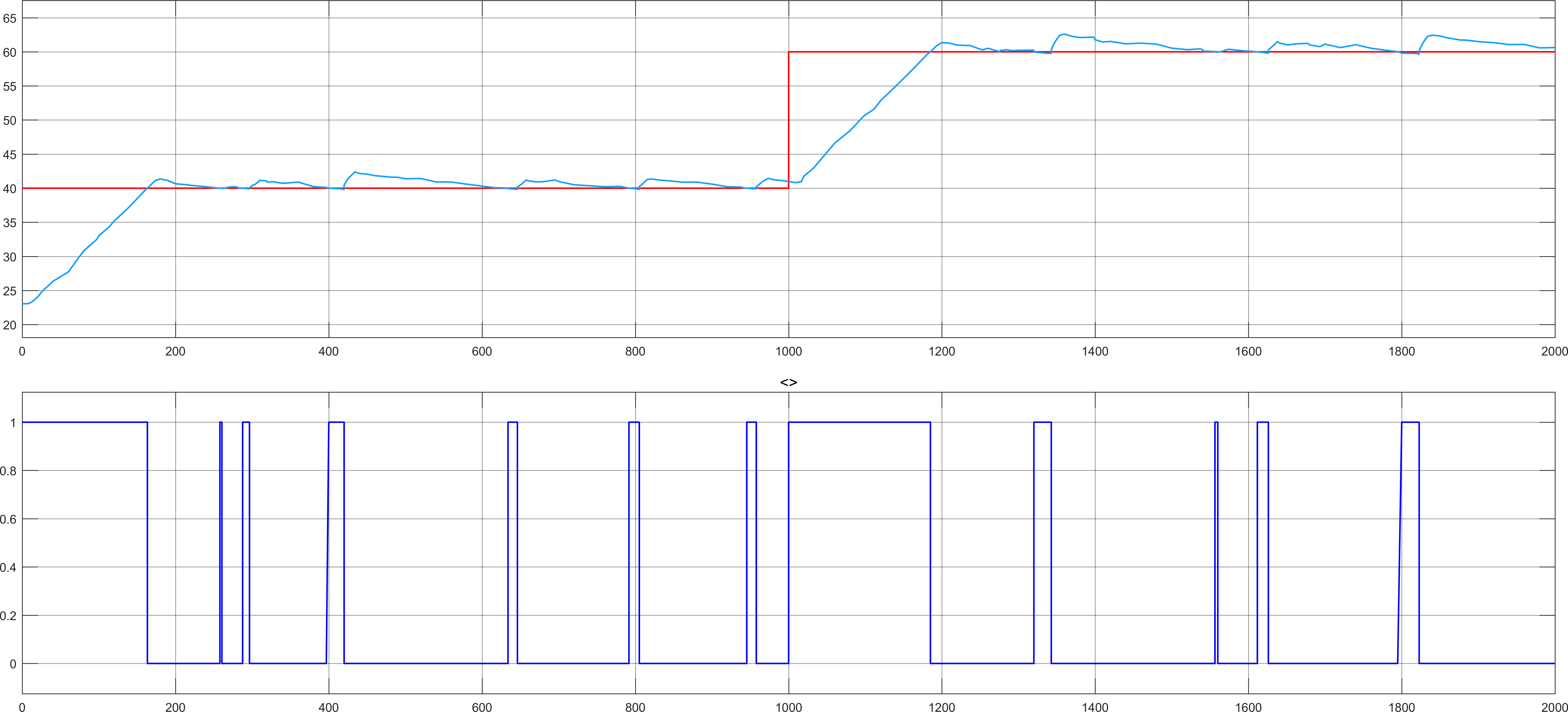
O controle on/off consiste em aplicar sinal de controle máximo ou mínimo caso a planta esteja abaixo ou acima do setpoint, respectivamente. A Figura a seguir mostra o resultado desse tipo de controle. Note que o sinal é brusco e isso reflete em overshoots na saída, já que o sistema possui atraso.
Controle proporcional
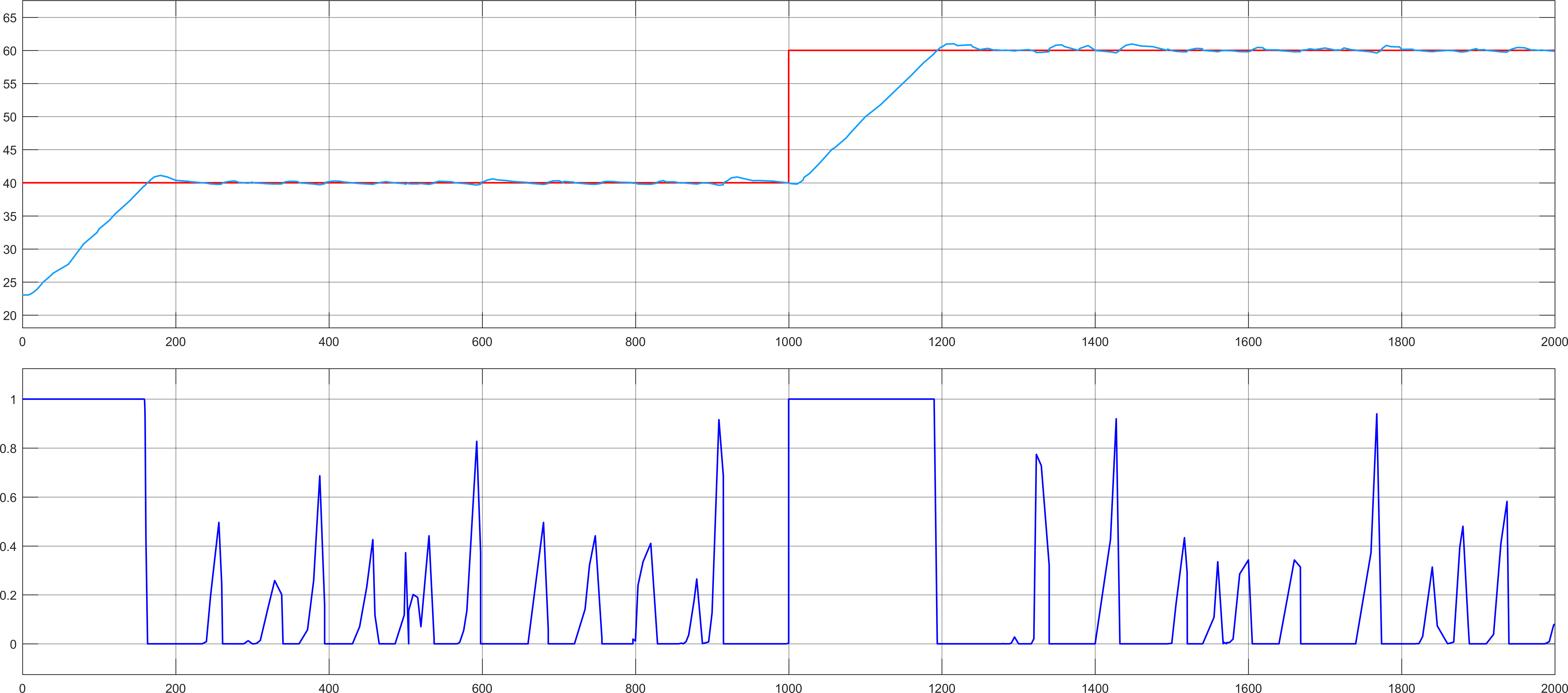
O controle proporcional é melhor empregado nessas situações porque possibilita uma ação de controle mais suave, fazendo com que a resposta possua menor erro em relação à referência.
Conclusão
Nesse experimento vimos a modelagem e simulação de um sistema físico real, passo que é muito importate no controle de processos. O próximo experimento consistirá em implementar o controlador para o mesmo sistema utilizando os módulos montados na documentação da planta térmica 1.