Experimento 3
Introdução
No experimento passado foi relizado o controle em malha fechada da planta térmica, que é muito mais simples e por isso pode ser modelado matematicamente. Para outros sistemas térmicos, a modelagem não é tão direta porque a saída depende de vários fatores.
No caso da peltier, a modelagem é mais complicada e depende da resistência térmica de todos os dissipadores de calor e da placa peltier, além de suas respectivas capacidades térmicas, parâmetros difícieis de obter matematicamente. Para uma modelagem mais detalhada nessa linha de raciocínio, veja este artigo.
Esse experimento parte pra outra abordagem, que é a identificação dos parâmetros do sistema através de testes com degrau. A dinâmica é então medida e podemos utilizar curvas que melhor se aproximam do sistema real.
Teste com o degrau
Para inserir um degrau no sistema, montamos o sistema de peltier como demonstrado na documentação da planta. Utilizamos uma fonte de tensão de 12V@3A como degrau no sistema, utilizando o circuito descrito. É importante fazer a identificação com o circuito pois ele adiciona uma resistência do transistor que diminui a corrente da peltier. A tensão foi mantida constante durante todo o experimento mas a corrente variou devido às características internas da peltier.
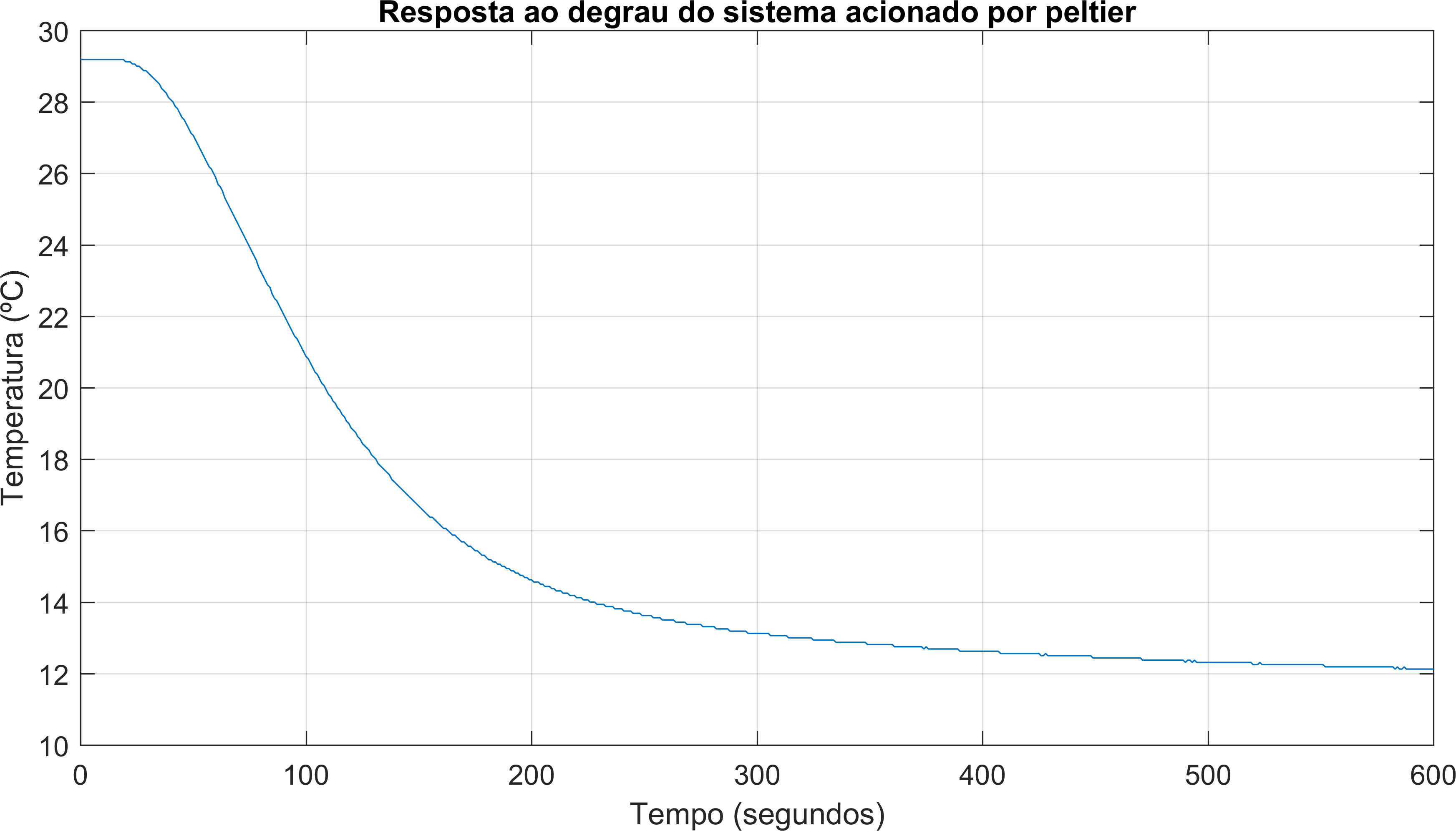
O gráfico da temperatura e os dados brutos do experimento podem ser vistos abaixo.
Baixe os dados brutos da resposta ao degrau.
Baixar dadosTratamento de dados
Para realizar a identificação do sistema, primeiro é preciso tratar os dados. Importe os dados utilizando a função load:
load('exp3.mat')
dados
Vamos fazer um plot da resposta ao degrau. Pode-se observar que o degrau é aplicado em 100 segundos e o sistema reage diminuindo a temperatura. Já é notável que o ganho do sistema é negativo e ele possui no mínimo dinâmica de segunda ordem.
plot(dados.time, dados.temperature); hold on;
plot(dados.time, dados.input)
Como o sample time Ts é igual à 1, não iremos precisar dos dados de tempo.
saida = dados.temperature;
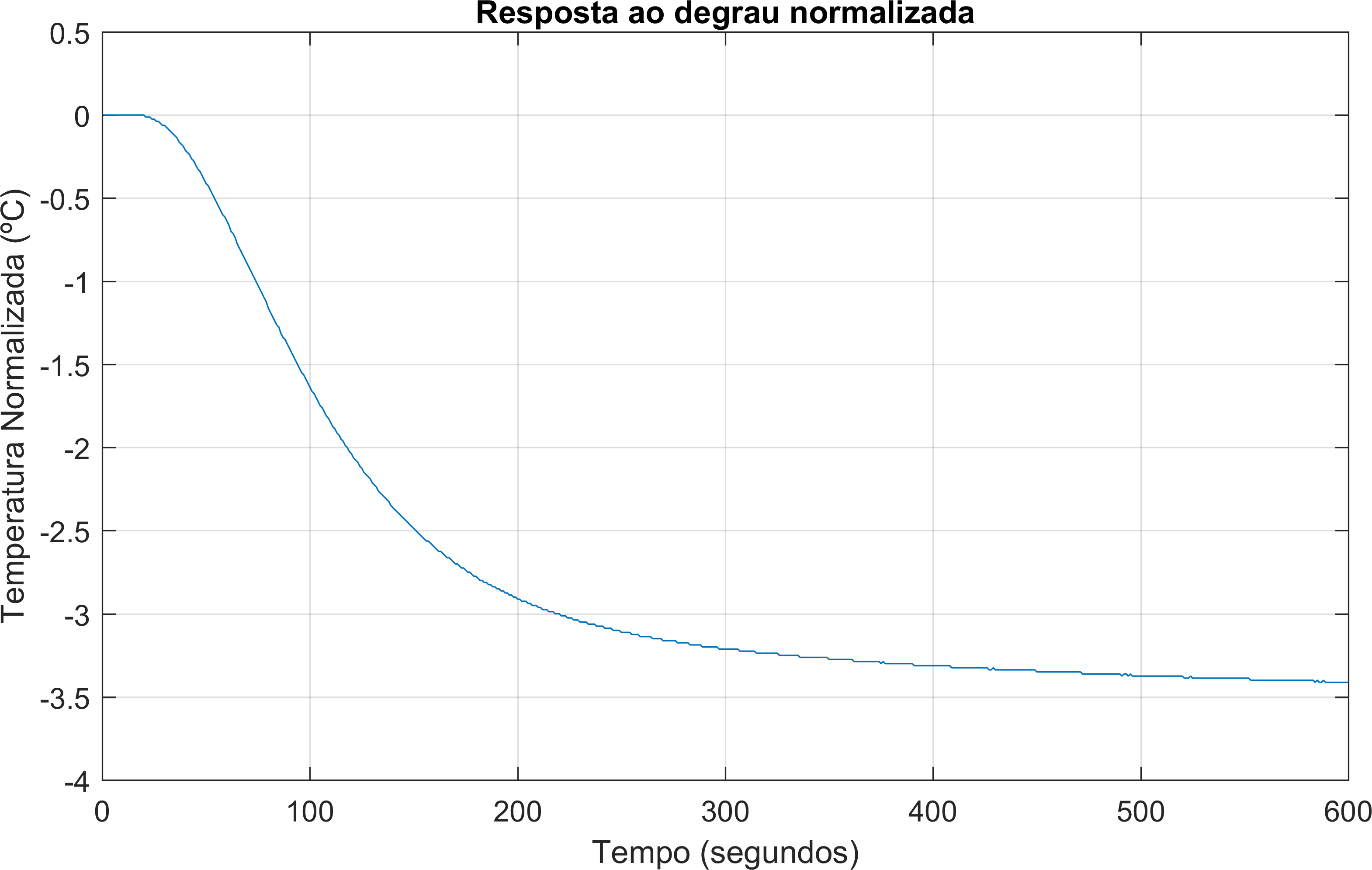
Todo sistema linear apresenta ponto de equilíbrio no zero, então será preciso linearizar o sistema. Para isto, basta remover o valor de offset:
saida = saida - saida(1);
Vamos também normalizar em relação ao degrau de entrada para obter a resposta ao degrau unitário. Como sabemos que o degrau aplicado pelo Arduino é de 5V, vamos modelar o sistema em torno desse valor para evitar conversões.
saida = saida/5;
plot(saida);
Já é possível inferir que o ganho do sistema é aproximadamente -3.5. É necessário agora aproximá-lo por uma função de transferência ou modelo no espaço de estados.
Aproximação por tfest
Como o sistema tem ordem elevada, métodos empíricos como Ziegler-Nichols, Hagglund, Nishikawa e Sundaresan não funcionam pois predizem modelos de primeira ordem.
Uma alternativa é usar métodos numéricos que melhor se adequam aos dados. Pode-se, por exemplo, utilizar a função tfest que estima o melhor modelo dada a ordem do sistema. Primeiro, é necessário criar uma variável que contém os dados do modelo:
Ts = 1;
tsaida = saida;
tentrada = dados.input/5;
data = iddata(tsaida, tentrada, Ts);
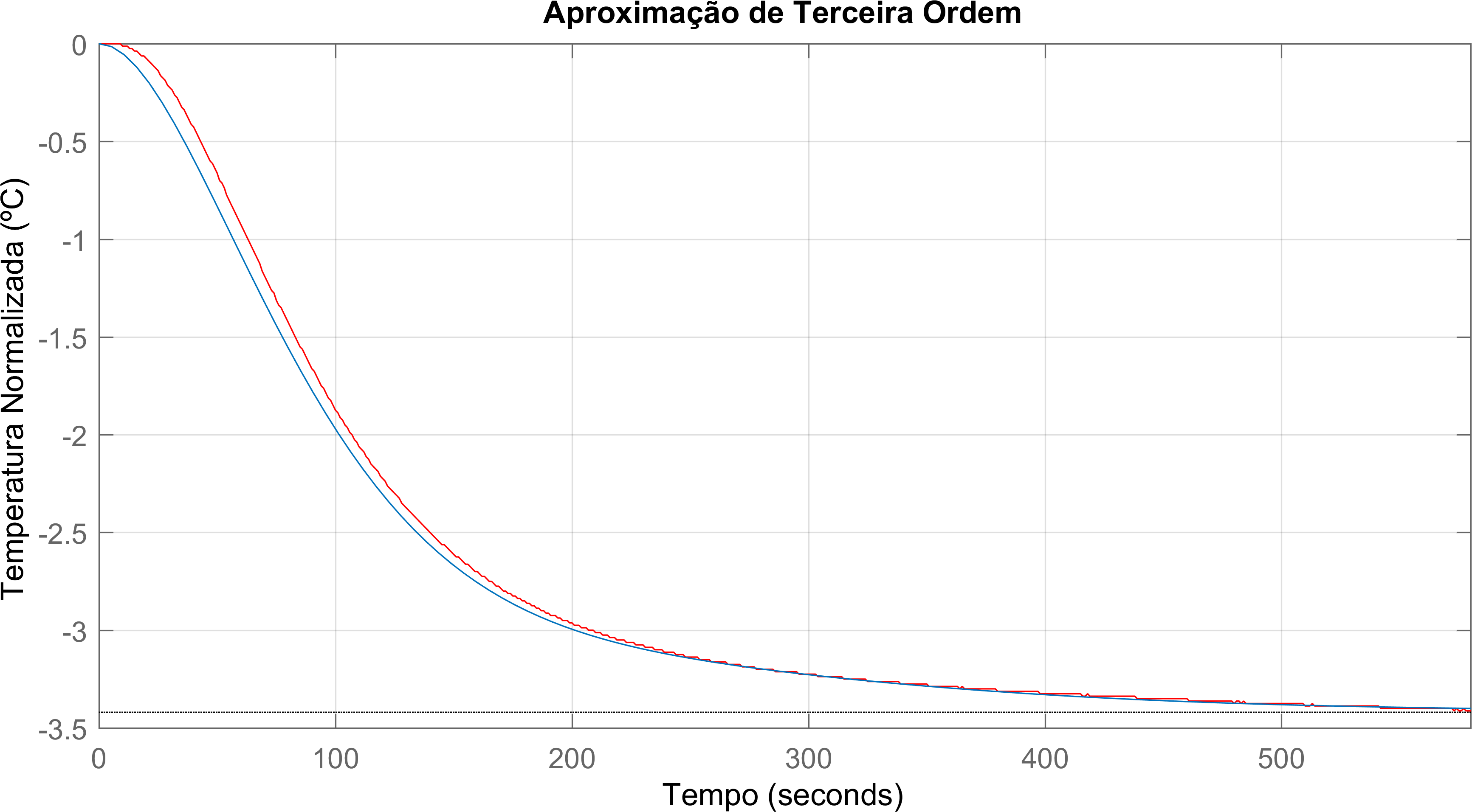
É recomendado adicionar alguns zeros antes do degrau pela documentação da função (que os dados já possuem). Podemos inicialmente estimar um sistema de três polos e um zero, baseando-se na resposta desejada.
G = tfest(data, 3, 1)
O resultado aparenta ser bastante bom:
G =
From input "u1" to output "y1":
-0.001096 s - 1.629e-05
-------------------------------------------
s^3 + 0.04304 s^2 + 0.0008624 s + 4.763e-06
Continuous-time identified transfer function.
Parameterization:
Number of poles: 3 Number of zeros: 1
Number of free coefficients: 5
Use "tfdata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using TFEST on time domain data "data".
Fit to estimation data: 99.15% (simulation focus)
FPE: 7.844e-05, MSE: 7.639e-05
Pode-se observar que o matching é quase perfeito dos dois sistemas (aproximação e real), mas a ordem ainda pode ser reduzida sem muita perda de informação (note que as constantes do numerador e denominador são muito pequenas).
Aproximação de segunda ordem ordem
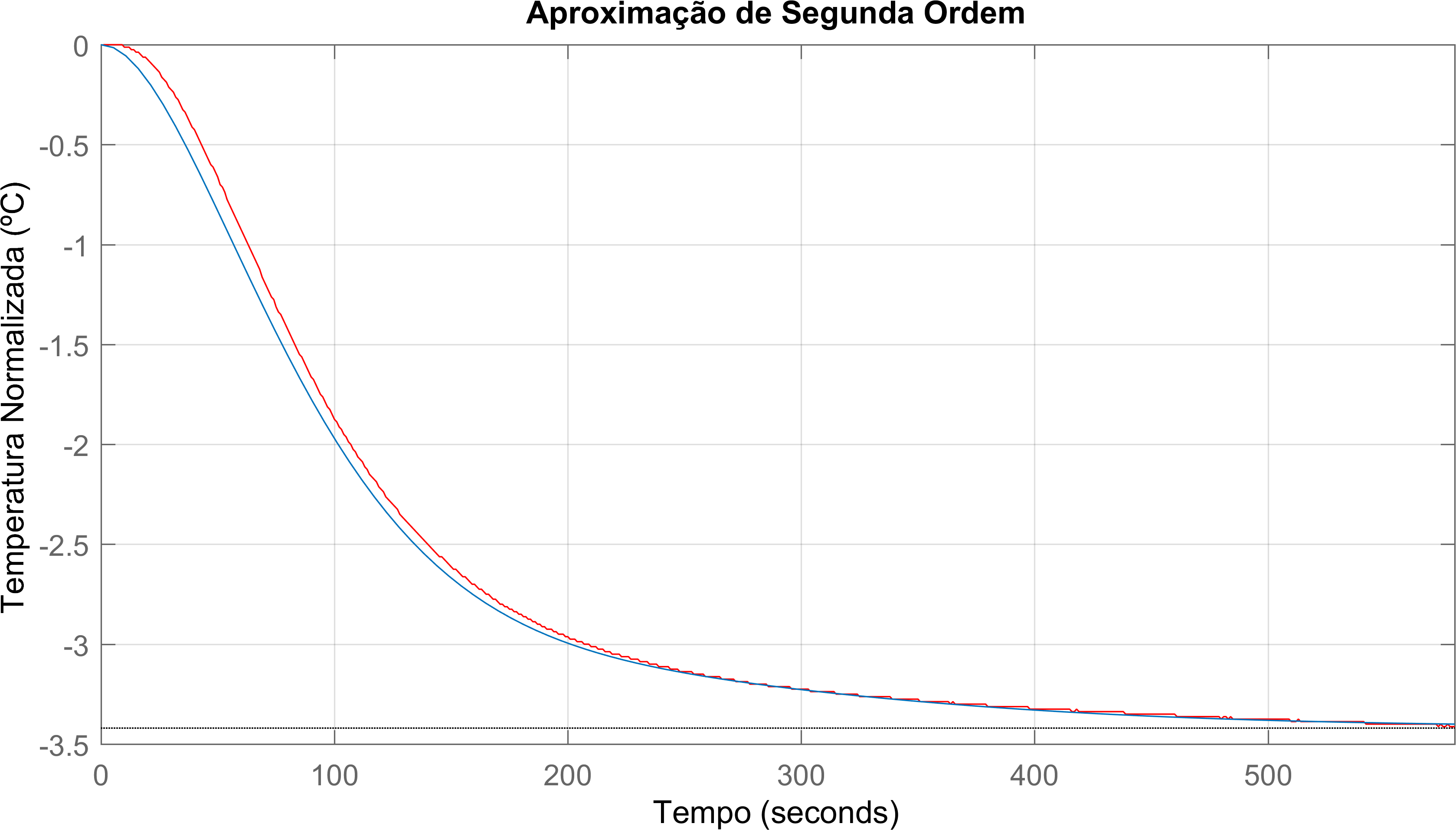
Muitas vezes, para facilitar o projeto do controlador é necessário reduzir a ordem do sistema. Pode-se obter também um modelo reduzido, mas que não vai ser tão realista. Nesse caso, o modelo de segunda ordem se adequa bastante pois a dinâmica é mais simples, mas para sistemas mais complexos, o ideal é obter o menor modelo possível para controle.
G = tfest(data, 2, 0)
Que dá como resultado uma aproximação pior mas com ordem reduzida.
G =
-0.001532
---------------------------
s^2 + 0.04669 s + 0.0004554
Fit to estimation data: 97.09% (simulation focus)
Modelo Completo
Com base nos modelos obtidos anteriormente, pode-se obter um modelo completo da planta. Foi feito um bloco com o modelo no simulink para testar os possíveis controladores no sistema.
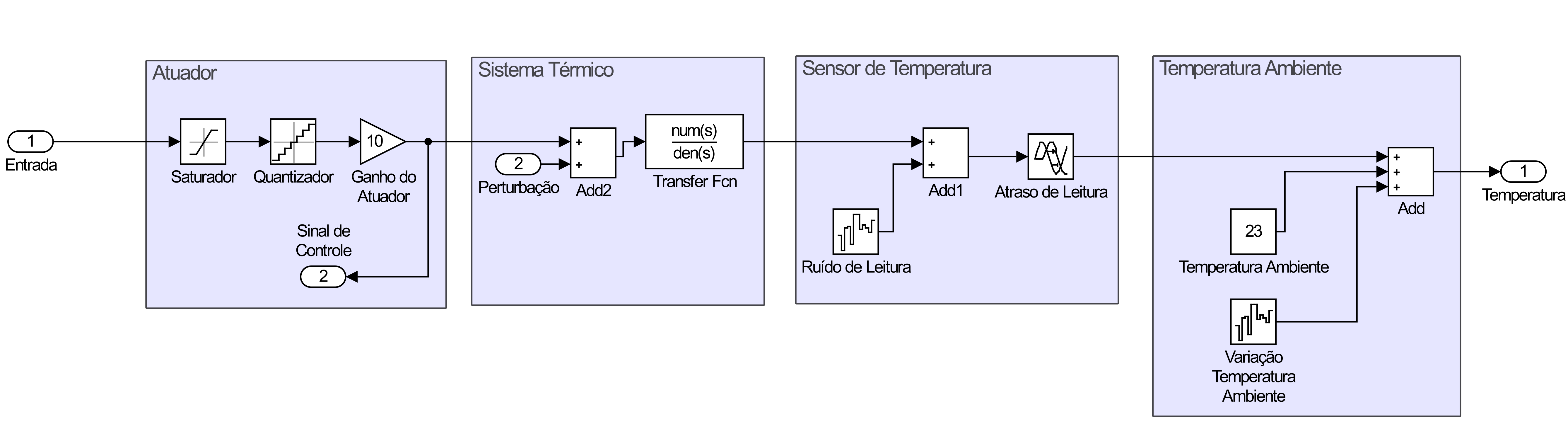
Baixe o modelo no Simulink para utilizar no MATLAB.
Baixar modeloConclusão
Esse experimento realizou a identificação de um modelo a partir da resposta ao degrau. O próximo experimento abordará o projeto e implementação do controlador para o sistema utilizando a aproximação obtida.